Time-of-flight Simulator
Time-Gated Rendering
During the last decade, we have been witnessing the continued development of new time-of-flight imaging devices, and their increased use in numerous and varied applications. However, physics-based rendering techniques that can accurately simulate these devices are still lacking: while existing algorithms are adequate for certain tasks, such as simulating transient cameras, they are very inefficient for simulating time-gated cameras because of the large number of wasted path samples.
Ellipsoidal Path Connections for Time-Gated Rendering
We take steps towards addressing these deficiencies, by introducing a procedure for efficiently sampling paths with a predetermined length, and incorporating it within rendering frameworks tailored towards simulating time-gated imaging. We use our open-source implementation of the above to empirically demonstrate improved rendering performance in a variety of applications, including simulating proximity sensors, imaging through occlusions, depth-selective cameras, transient imaging in dynamic scenes, and non-line-of-sight imaging.
Time-of-flight Camera
More Info
Time-of-flight (ToF) imaging is revolutionizing a large array of applications including robotics, autonomous navigation, atmospheric sciences, medicine, and even entertainment and human-computer interaction. Unlike conventional intensity sensors, ToF sensors exploit the fact that the speed of light is finite, and record information about the time it takes for photons to travel from a light source to the sensor.
Physically-based Rendering
More Info
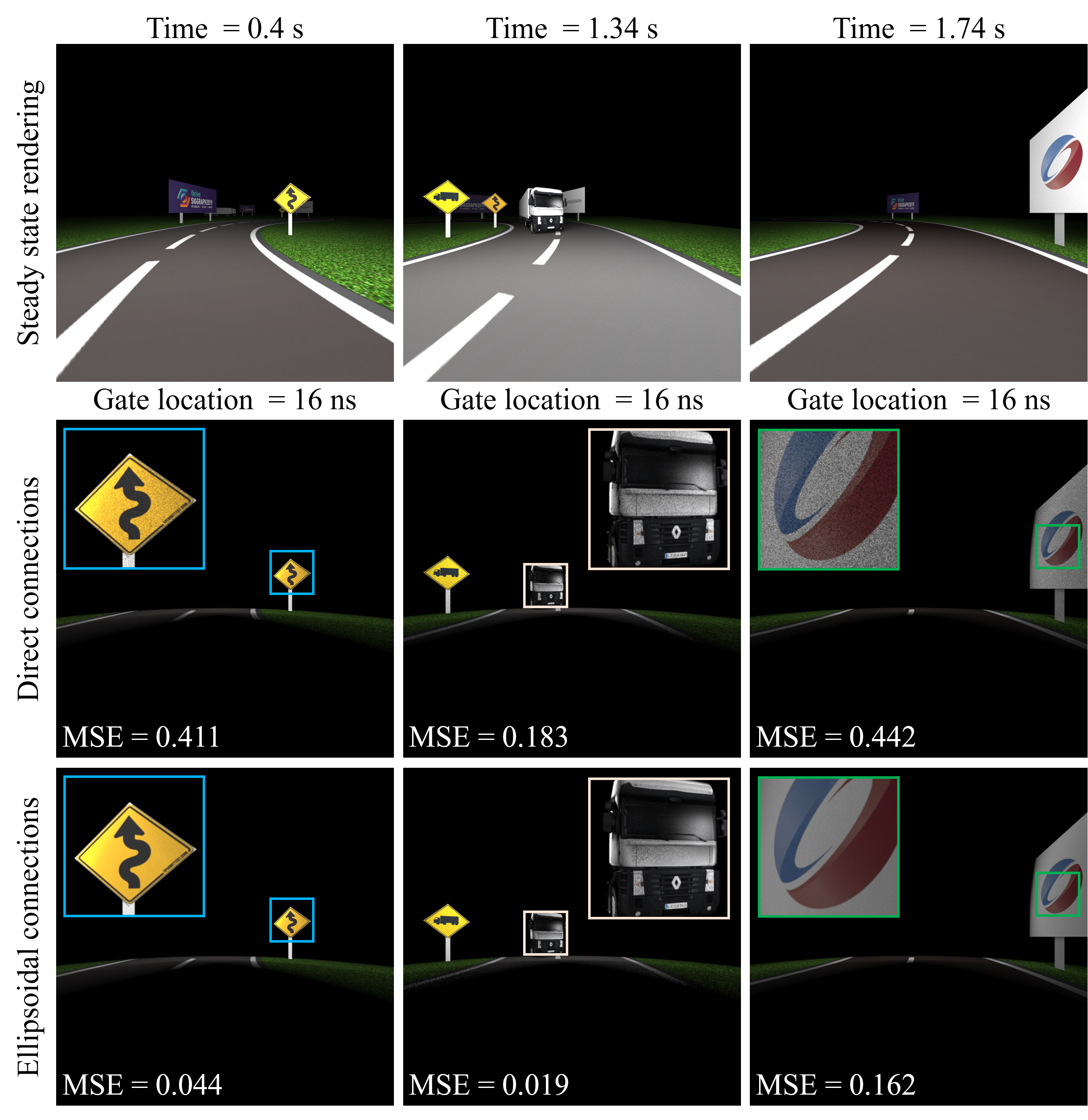
One important type of ToF rendering tasks involves simulating images that accumulate contributions only from a small subset of photons, whose time of travel is within some narrow interval. These time-gated rendering tasks arise in a large number of practical situations; examples include time-gated sensors used as proximity detectors, gated laser ranging cameras, as well as situations where transient imaging is performed in dynamic scenes such as outdoors environments or tissue with blood flow. Unfortunately, existing rendering algorithms cannot be used for efficient time-gated rendering: the vast majority of the paths generated by these algorithms end up being rejected, for having length outside the narrow range accumulated by the simulated sensor.
Efficient Rendering
More Info
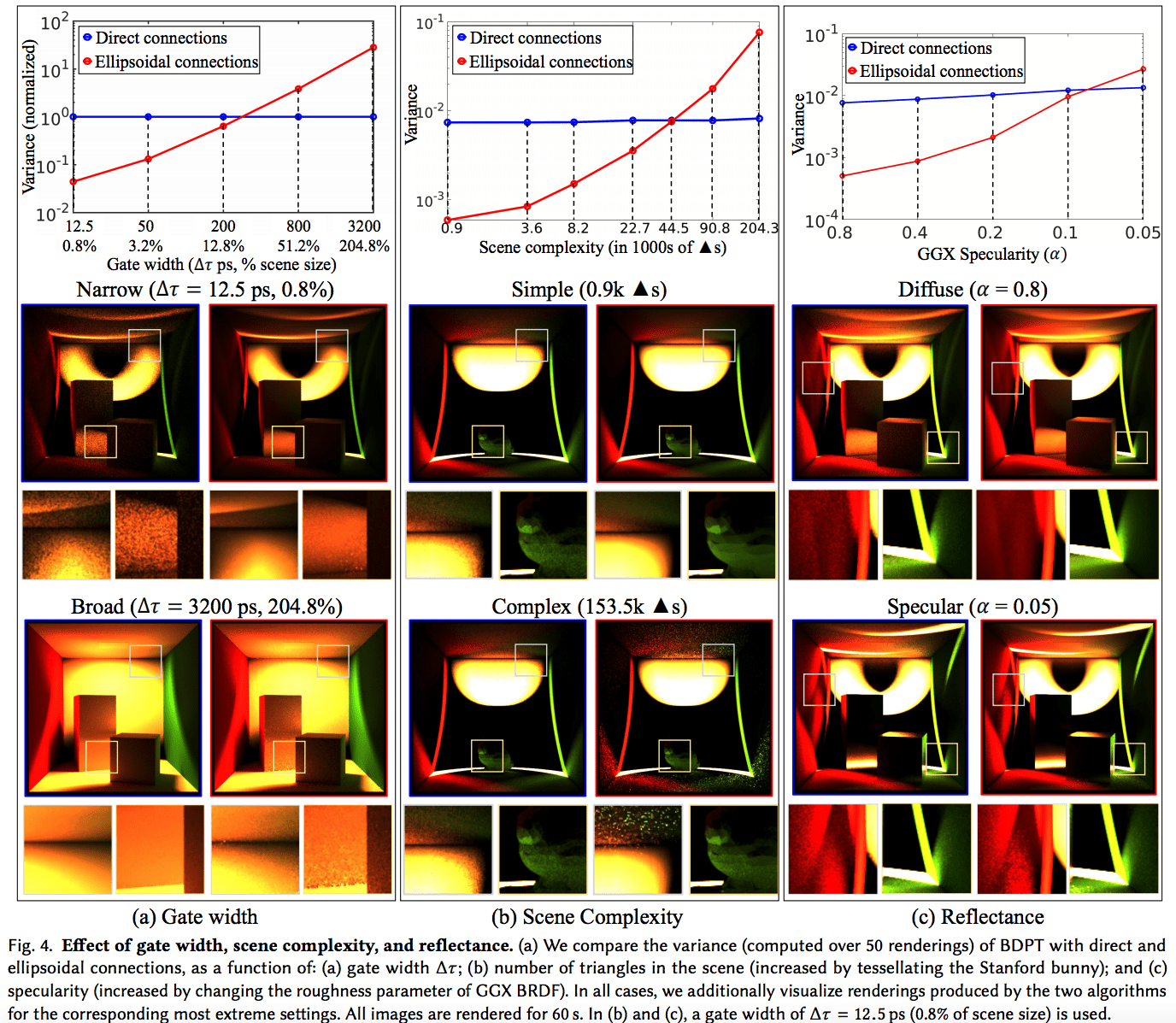
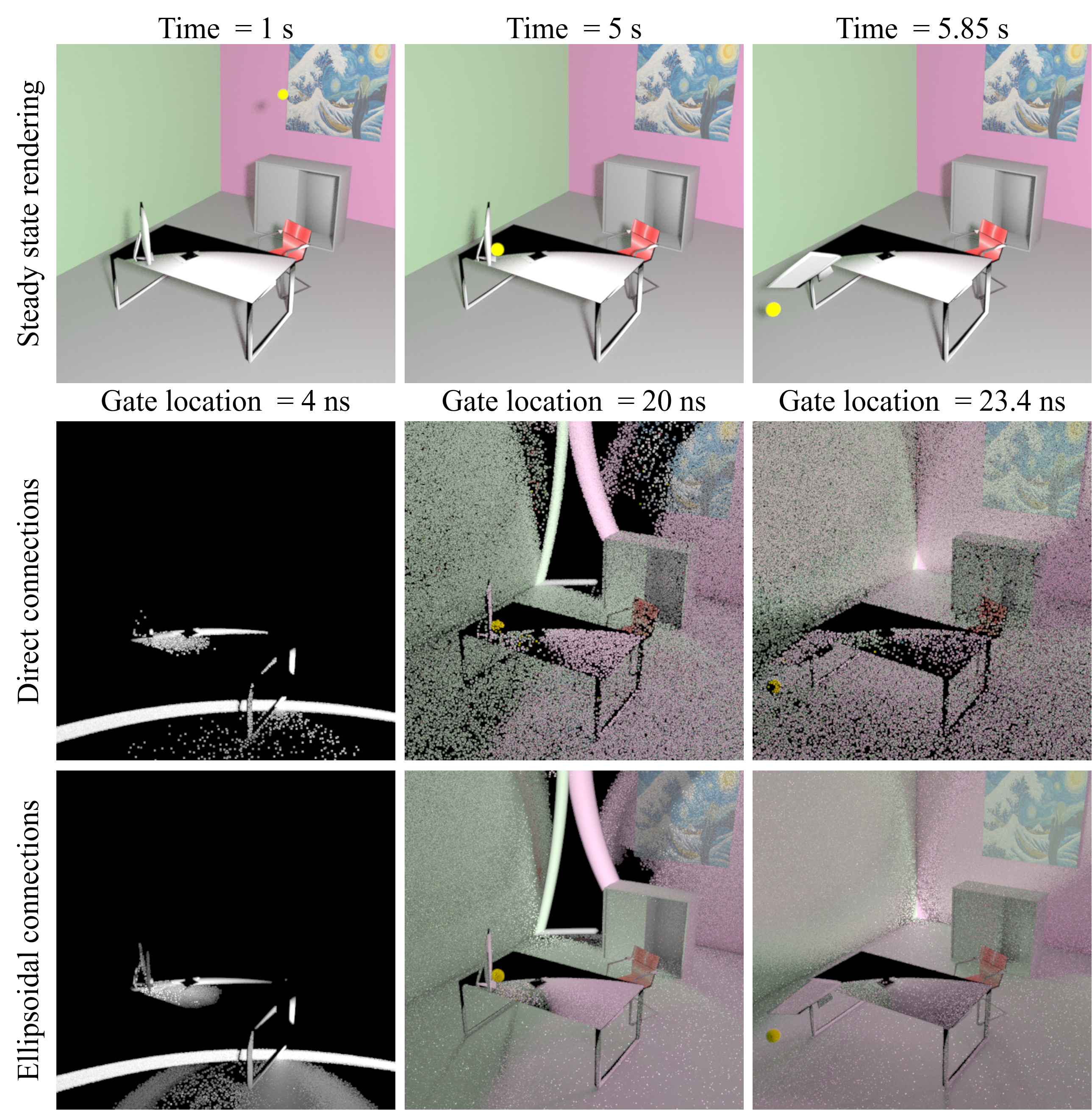
We develop a path-sampling technique that generates paths with a predetermined target length. This technique is a variant of standard bidirectional path tracing, which we term bidirectional path tracing with ellipsoidal connections. This allows us to simulate time-gated sensors without having to reject an excessive number of sample paths.
People
Adithya Pediredla

Ashok Veeraraghavan

Ioannis Gkioulekas